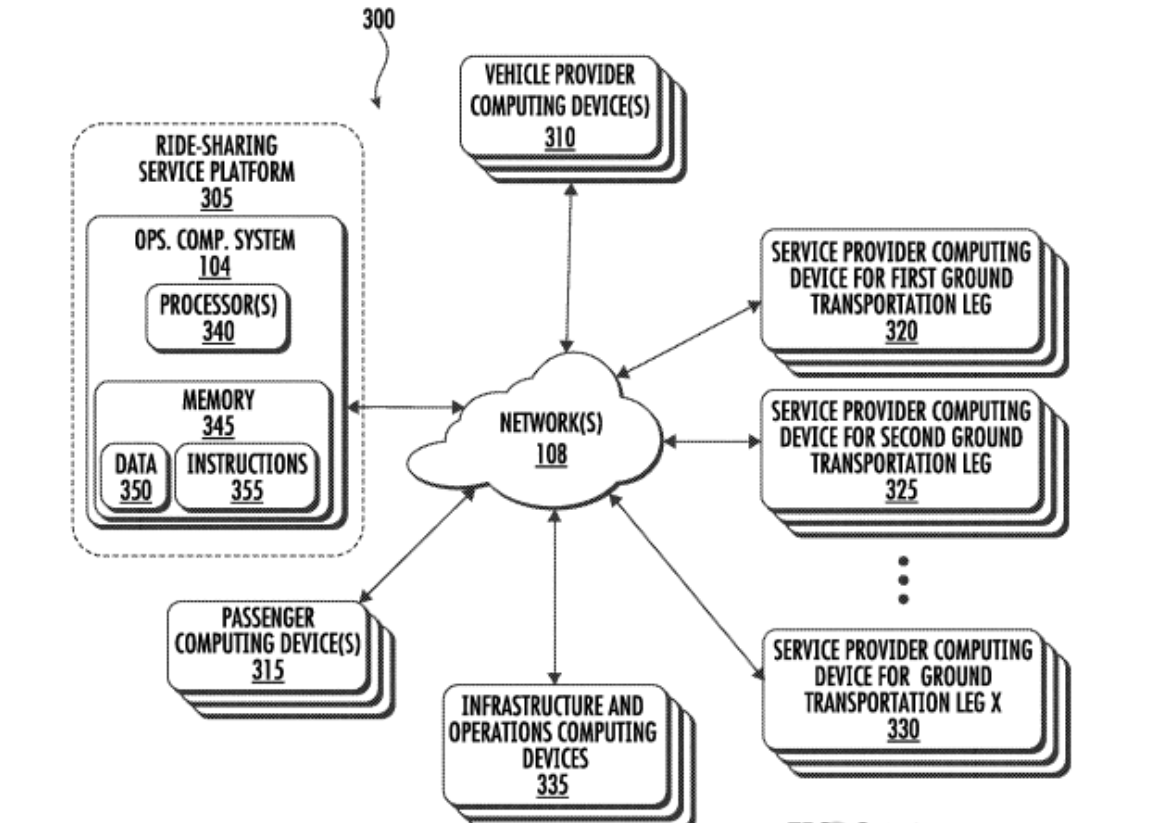
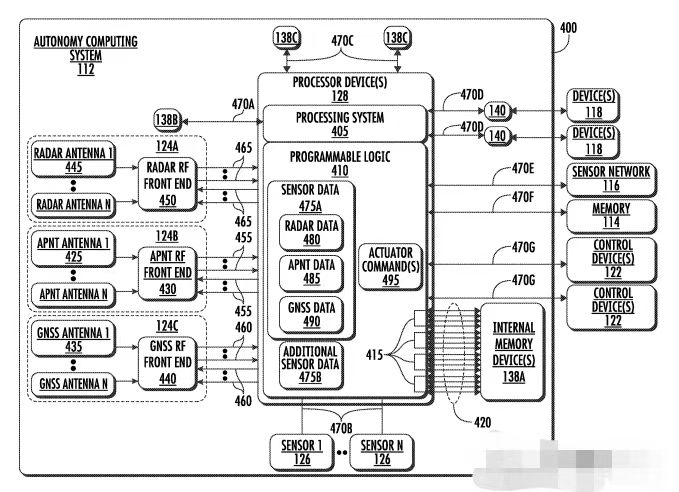
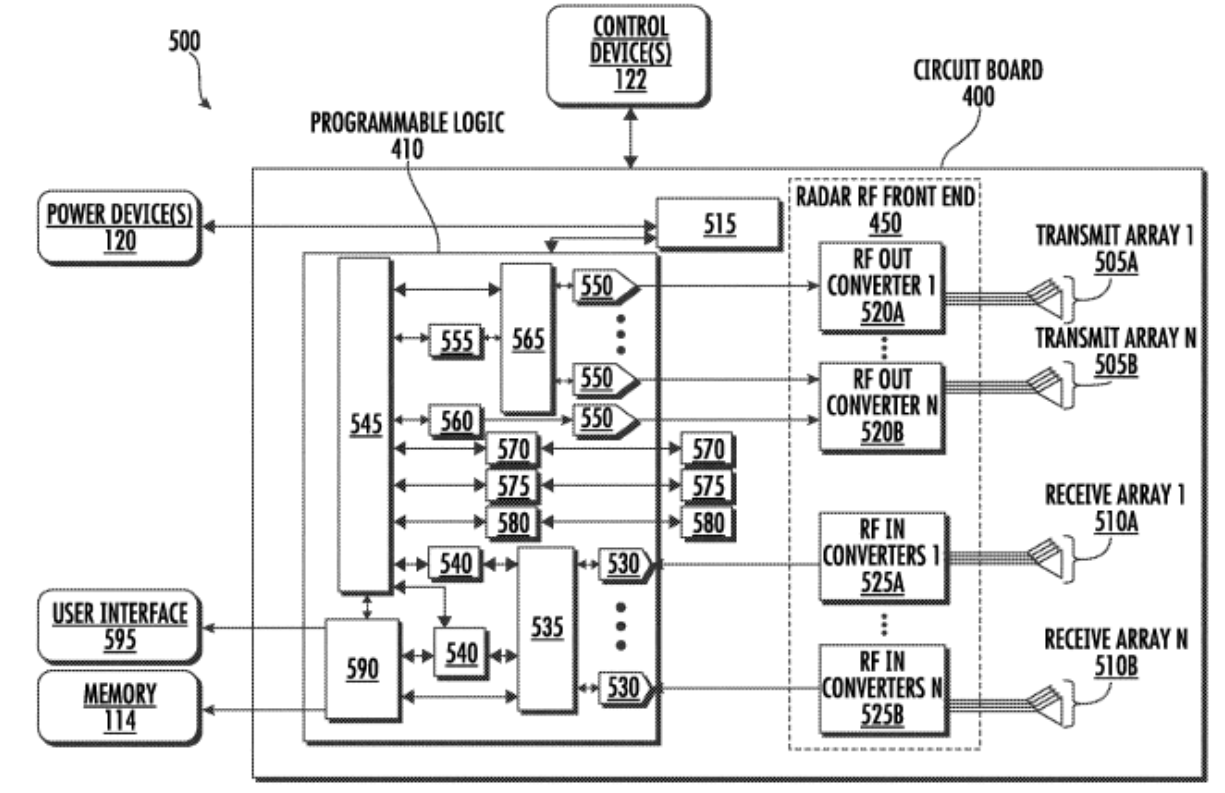
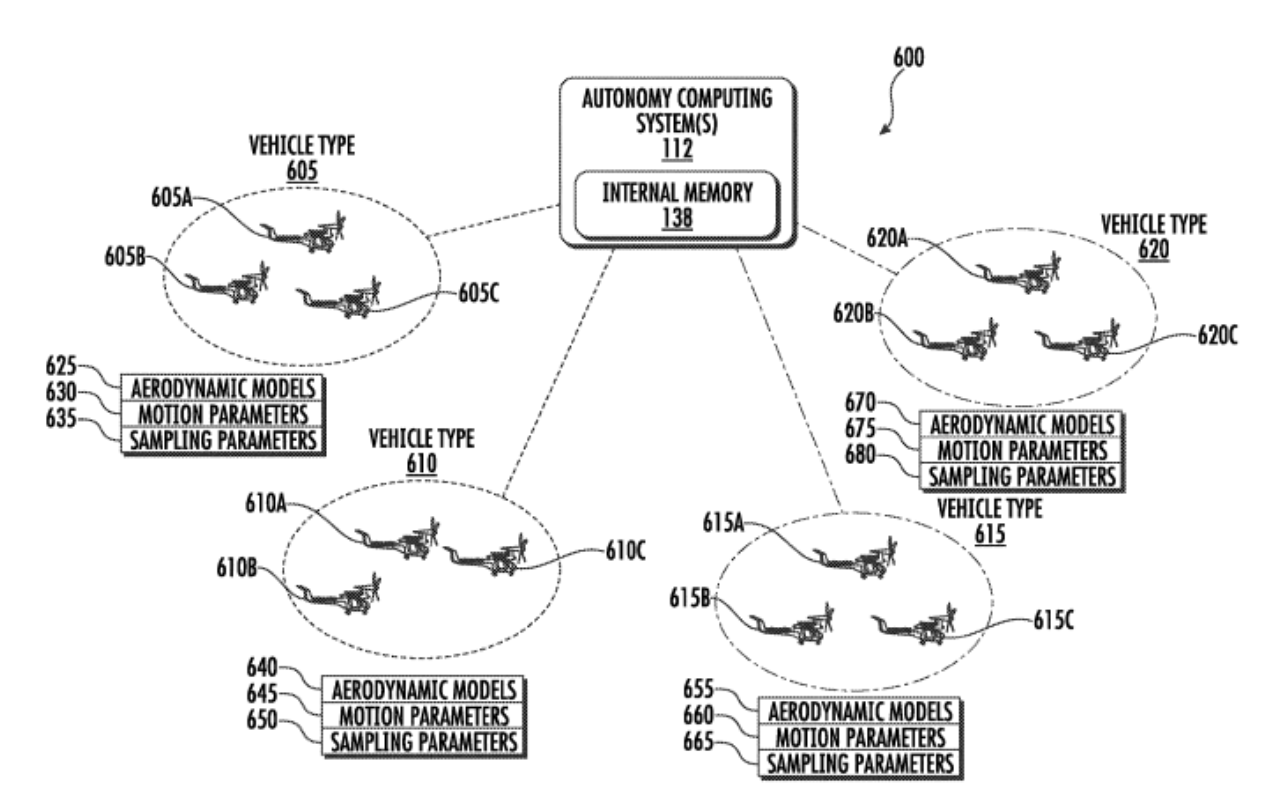
Joby的自主飞行系统架构 2024-02-15 08:09:55 Joby开发一个用于控制飞行器的系统和方法。飞行器包括一块带有多个处理器设备的电路板和一个包含执行自主运行指令的存储器。自主运行包括从连接到处理器设备的GNSS组件获得GNSS数据,从连接到处理器设备的APNT组件获得APNT数据,以及从连接至处理器的雷达组件获得雷达数据。每个组件被布置在包括多个处理器设备的同一电路板上。处理器设备基于GNSS数据确定整机位置、APNT数据和雷达数据,基于雷达数据识别空中物体,基于整机位置和识别的物体生成运动计划,并基于整机位置启动空中运动。 整个运营生态的自主设备交互 自主计算机系统架构 雷达感知 高密度网络运行需要自主系统的全生态布局 最后提一下,我们经常讨论的SVO和自主飞行,两者之间本身并不矛盾,SVO很多工作的沉淀对于自主飞行也是必须的。