尾座式单涵道式无人机控制系统设计

近年来,得益于电子控制技术、通信技术和小型电机技术的进步,无人飞行器的成本不断降低,功能更加丰富,在工业、军事、农业、和消费市场均得到了广泛应用。随着无人机(unmanned aerial vehicle, UAV)的应用范围扩大,对无人机的要求也在提高,传统的固定翼无人机需要大空间起飞降落,也无法在特定空域悬停。
近年新兴的多轴旋翼飞行器虽然可以实现悬停,但存在能源效率低,飞行速度慢等问题。因此,既可垂直起降又可高速飞行、机动性能好、推动效率高、隐蔽性高、安全性好的涵道式无人机得到了中外研究人员的关注。崔剑飞提出了一种将合成射流激励器应用到涵道风扇无人机中,对涵道风扇进行了详细的气动力和气动力矩分析,为结构设计优化和控制系统设计提供了理论研究基础,研究涵道飞行器的性能和稳定性特征,但未将飞行器模型进行实际应用。Tayyab等针对管道风机无人机(ducted fan unmanned aerial vehicle,DFUAV)在存在各种不确定性和外界扰动的情况下,采用无偏移模型预测控制(model predictive control,MPC)技术的轨迹跟踪控制问题。该策略旨在确保足够的飞行鲁棒性和稳定性,同时克服时间延误、参数不确定性和干扰的影响,仿真了不同飞行阶段(包括自主飞行)的控制性能,验证了所设计策略的性能。Tran等提出了一种鲁棒自适应杆位控制(robust adaptive pole-placement control,RAPPC)方案应用于DFUAV,尽管存在有界干扰和不确定性,但单个DFUAV系统的偏航角跟踪误差仍保持在紧凑的集合内,但俯仰角及翻滚角跟踪误差表现欠佳。蒙超恒针对涵道风扇式无人机设计了自抗扰控制器进行姿态控制,对单涵道无人机为了既能对所有可达的期望力矩返回容许控制,又能对不可达的期望力矩做进一步的优化,提出一种优先级控制分配方法并在实验平台上进行了实验试验,但飞行器整体功能单一缺乏地面站、飞行日志记录、导航命令发布等功能。
综上可知,关于单涵道飞行器控制的研究经过近些年研究人员的努力已经取得了一些优秀的成果,但仍然存在一些不足的地方。为此,设计了一款结构紧凑、设计完整、功能齐全、飞行稳定且续航时间长的单涵道飞行器,为单涵道飞行器设计提供一种全面性系统性的方案。结构采用单涵道加可拆卸机翼的形式不仅设计紧凑且可在仅使用竖飞模式时拆掉机翼大大缩减所需的飞行空间;飞行器的控制系统基于实时操作系统UCOS Ⅲ设计提高了系统的实时性同时设计了一种基于双闭环增量比例微分积分算法(proportion integral derivative,PID)的姿态控制器提高姿态角的解耦能力,抑制随机干扰的产生,提高系统的鲁棒性以及对指令的跟踪性能;基于 Unity3D平台和 C#语言编写兼飞行模拟器的地面站程序,有赖于Unity3D的跨平台特性本地面站具有在计算机、智能手机、智能电视等多类平台运行的能力最大程度摆脱工作环境的限制达到对飞行器进行远程控制、数据采集和在线调参等。通过基本的飞行实验验证飞行器姿态控制以及指令跟踪的性能。研究验证了单涵道飞行器的可行性,为单涵道飞行器的工程应用提供了一个整体可行性高、高性能的控制策略与方案。
飞行器的结构及动力学模型
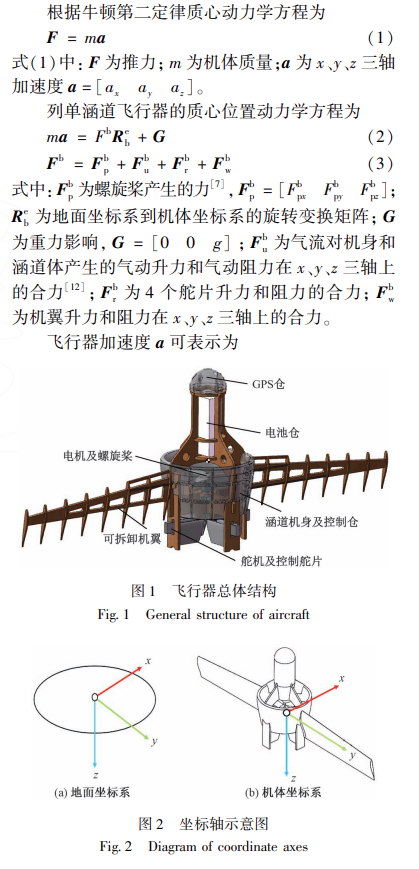
所设计的单涵道飞行器结构主要包括:全球定位系统(global positioning system,GPS)仓、电池仓、电机及螺旋桨、涵道机身及控制仓、控制舵片、支架、可拆卸机翼,总体结构如图1所示。总体的动力由电机带动螺旋桨旋转产生,通过控制器对4个控制舵面进行协调控制气流的方向实现对飞行器飞行姿态的控制。
飞行器此布局有以下优点:①所有器件居中放置,飞行器重心易靠近中轴线,机体z轴上转动惯量小,飞行器运动灵活;②电池位于飞行器头部,可以提高飞行器重心,不仅增加了舵片到重心的控制力臂,也有助于压低飞行器姿态,使飞行器更容易从悬停姿态转换到平飞姿态和抵抗涵道侧风扭矩的影响;③涵道直径小,机翼截面积小,飞行器的飞行阻力低,可兼具悬停和平飞性能;④机翼采用可拆卸式设计,在以悬停为主的飞行场合可以拆卸机翼,减小质量和飞行阻力。
为建立飞行器的动力学和运动学数学模型,使用两个坐标系来描述向量:地面坐标系Obxyz 和机体坐标系Oexyz,如图2所示。
飞行器硬件系统
设计的单涵道飞行器硬件系统主要分为机载硬件系统和地面控制站,总体结构如图3所示。
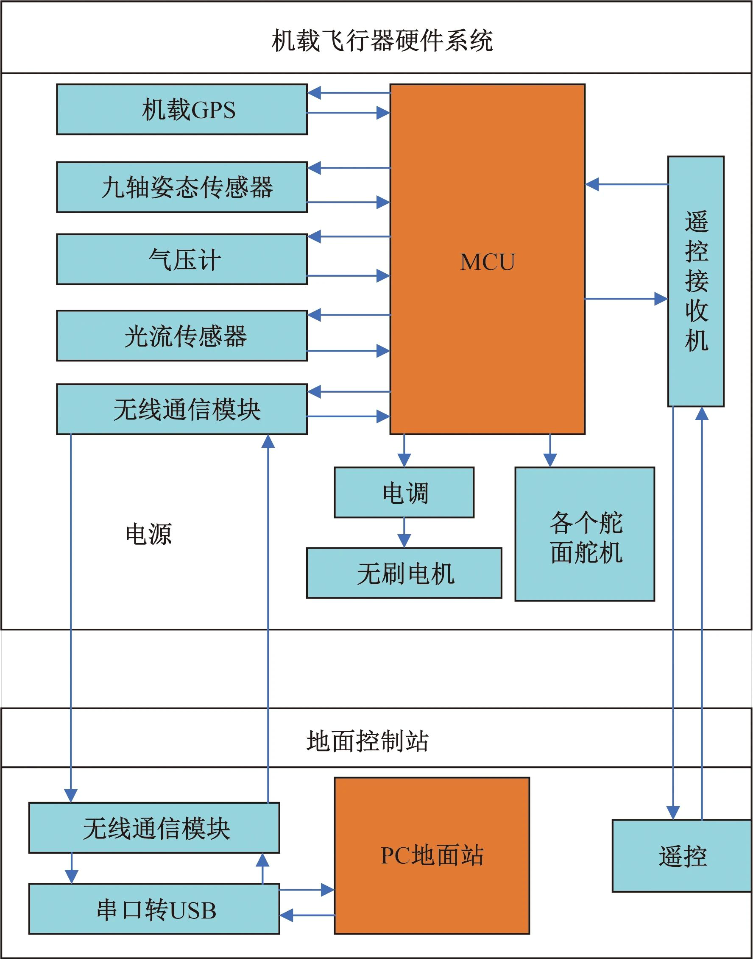
图3 飞行器硬件系统结构图
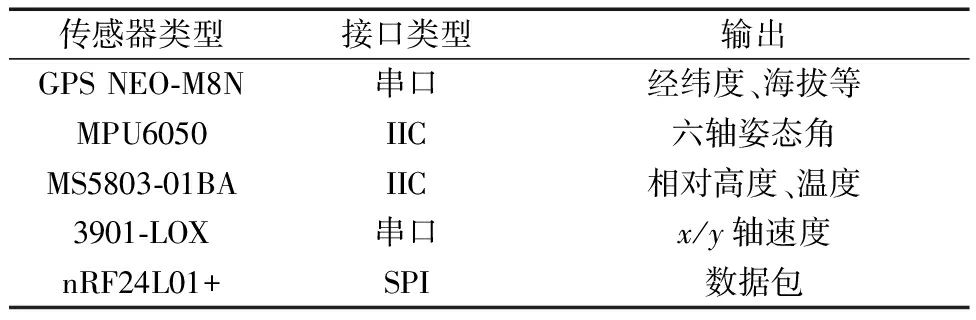
微控制单元(microcontroller unit,MCU)使用的是STM32F103C8T6作为主控芯片其性价比高且功耗低非常适合应用到飞行器上,机载GPS模块采用的是NEO-M8N其搜星速度快、数量多且定位精度高刷新速度快;姿态传感器使用地磁计及MPU6050其集成了陀螺仪和加速度计可给主控芯片提供6轴的姿态信息且尺寸小巧极其适合用在本设计的小型飞行器上;气压计使用MS5803-01BA其工作稳定,精度高最高可达10 cm;光流传感器采用MATEK公司的3901-LOX运算速度快,高感光度能精准实现控高悬停;选用nRF24L01+模块作为控制系统的无线通信模块是一款通信稳定、功能强大、成本低的无线通信芯片,可以满足本无人机的无线控制需求,各模块详细信息如表1所示。
表1 各传感器/模块信息
为实现本设计单涵道飞行器的小巧灵活给予控制仓空间是有限的,所以主控板硬件设计依据紧凑稳定的要求设计了43 mm(长)×39 mm(宽)×22 mm(高)的机载主控板。
飞行器软件系统
一、软件框架
为了提高系统的实时性和稳定性,在控制系统的软件部分中移植了实时操作系统UCOS Ⅲ实现多任务并行执行提高系统的处理能力以及实时响应能力。软件系统从结构上可分为:系统层、应用函数层、底层驱动与接口层,具体层次结构如图4所示。
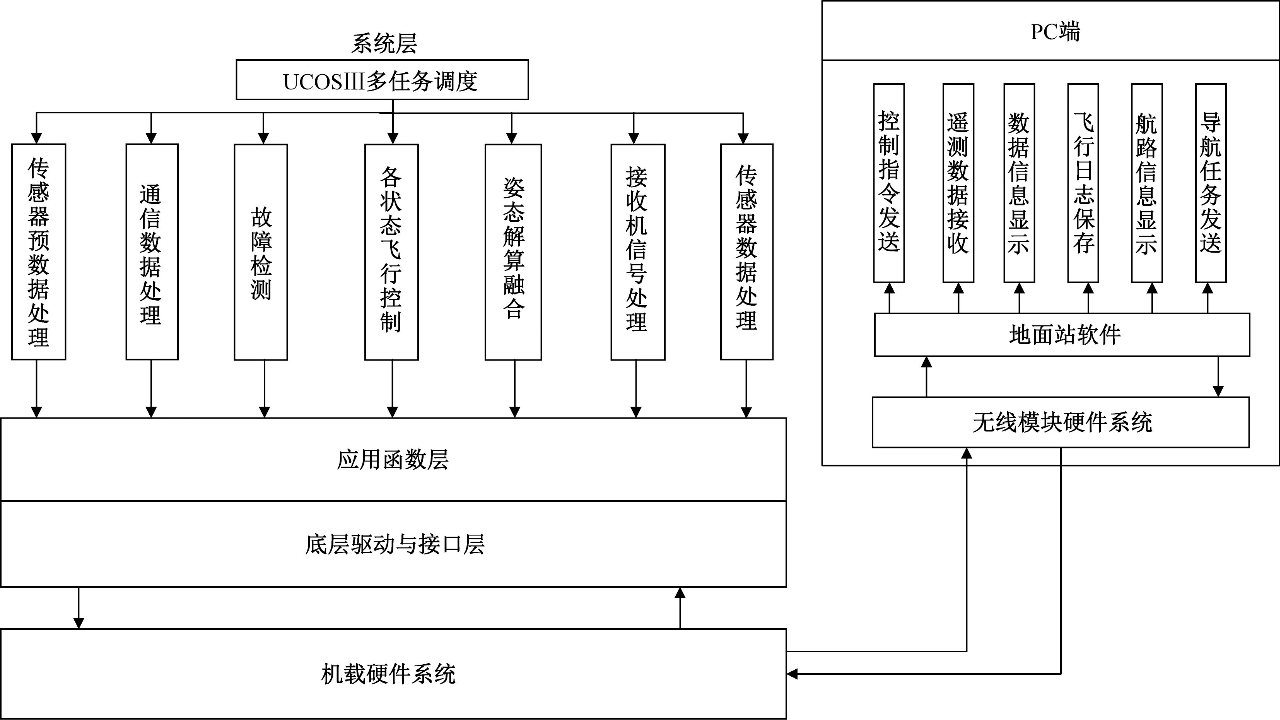
图4 飞行器软件系统结构图
底层驱动与接口层主要包括系统初始化、中断服务程序、各种接口驱动程序。应用函数层是联结系统层与底层驱动与接口层的桥梁为系统层提供封装好的调用底层驱动与接口层实现部分功能的函数例如:无线通信的编/解码函数、各姿态控制函数、各传感器的数据读写程序、多传感器数据融合函数、数字滤波函数等。系统层是机载软件系统的核心部分,移植UCOS Ⅲ进行多任务调度和管理提高系统的实时性, 根据任务的优先级以及程序控制逻辑来进任务调度,完成各个任务的处理工作实时有效的控制飞行器达到控制目标。系统层任务如下。
(1)系统状态判断/控制。使用状态表示无人机的模式,通过限定状态转移实现无人机飞行模式的切换。切换状态后按照不同飞行模式执行相应的控制逻辑实现相应的目标。
(2)姿态控制任务。基于PID控制算法使无人机快速响应且稳定的处于各目标姿态。
(3)多传感器数据结算与融合。将多个传感器的原始数据进行滤波并融合解算出飞行器的姿态信息。
(4)无线通信任务。基于全双工双向通信协议控制无线通信电路,接收地面站命令和发送无人机数据。
(5)参数存储任务。存储飞行器校正、配置以及飞行任务的参数,简化系统启动后的配置流程。
二、姿态控制算法设计
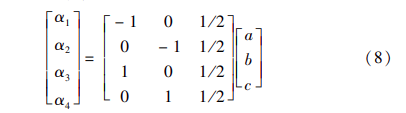
单涵道式飞行器的姿态控制系统依靠 4 方向的舵片产生的力矩(α1,α2,α3,α4)控制飞行器 3 轴的姿态,姿态控制算法输出 3个轴的控制量(a,b,c), 需要将其分配到 4个舵机上, 从而控制舵片偏转产生控制力矩。因此需确定各舵机的控制分配律通过对舵片的动力学分析确定舵机的控制分配如式(8)所示。
单涵道式各轴耦合严重,因此控制难度大,目前可用于单涵道式飞行器的姿态控制算法主要有PID控制,线性二次型(linear quadratic regulator,LQR)控制,鲁棒控制,自适应控制,模型预测控制(model predictive control, MPC)。采用本文离散的增量式 PID 控制器实现了无人机的姿态控制系统,PID 的控制规律为

式(9)中:ui为控制器在时间ti的输出;ei为ti时的控制量期望值ri与实际值si的差;Δti为更新时间ti与前一次更新时间ti-1的差;kp为比例系数;ki为积分系数;kd为微分系数。
由于 PID 控制是单输入单输出的控制法, 因此在控制设计中只能忽略无人机各轴间的耦合, 对每个姿态轴单独使用 PID 控制器,其中,飞行器x轴翻滚角φ、y轴俯仰角θ使用双闭环 PID 控制, 外环为姿态角控制器, 内环为角速度控制器;z轴角速度r使用单环角速度PID控制。控制器图如图5所示。
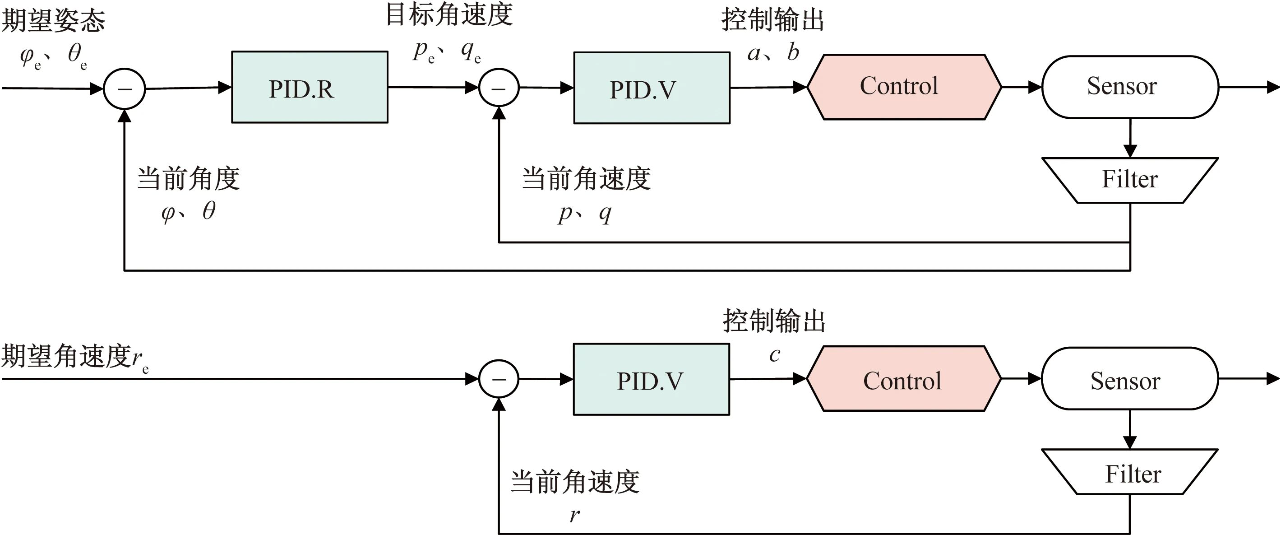
θ为俯仰角;θe为俯仰角期望角;qe为俯仰角期望角速度;PID.R为期望角PID控制外环; PID.V为期望角速度PID控制内环;Control为被控对象;Sensor为传感器;Filter为滤波
图5 控制器系统框图
以X轴控制为例子, 设 PID 控制器为期望值ri与实际值si的函数ui=FPID(ri,si,Δti),得姿态控制表达式为

式(10)中:φe为期望角;φ为实际角;pe为期望角速度;p为实际角速度;a为输出;FPID为PID函数。
采用双闭环控制时,外环控制器可以根据控制期望姿态角与机体姿态角的误差产生期望角速度,具有消除姿态角静差、使无人机跟随期望角的效果;内环回路随期望角速度和实际角速度的误差产生控制输出,具有提高系统动态响应速度和增强系统稳定性的效果。
三、系统状态机设计
为使飞行器正确启动和初始化,并确保操作过程安全以系统的稳定,在无人机软件控制系统内设计一个关于无人机模式的状态机,其构造如图6所示。
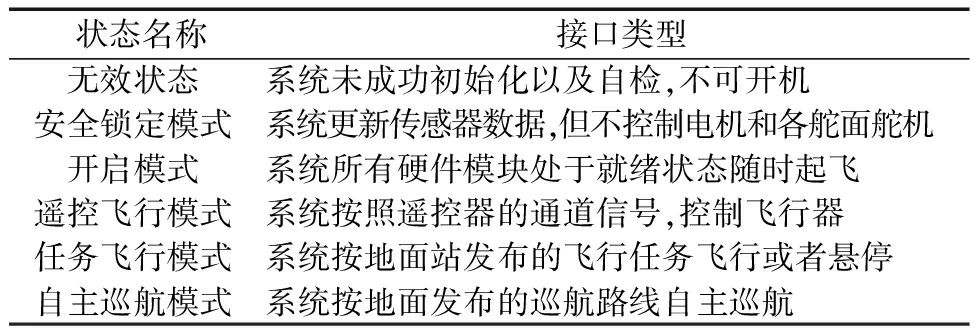
状态机有 1个隐含状态和 6个确定状态,隐含状态是未通电的状态,其他确定状态含义如表2所示。
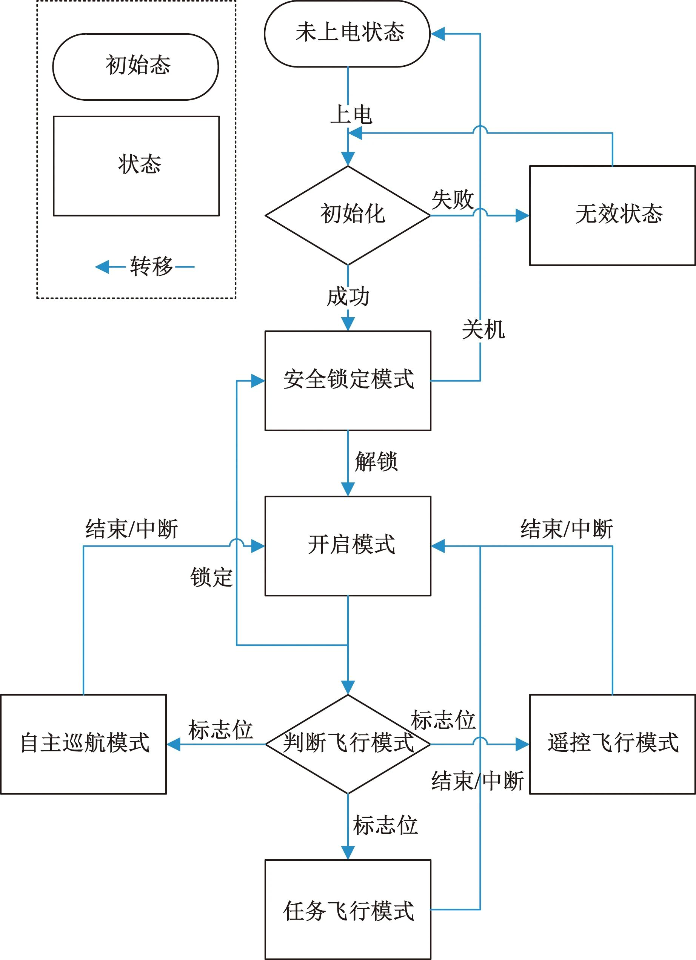
图6 系统状态机
表2 各状态含义
飞行器的各个状态的判断与切换由系统层中状态判断任务进行判断并对标志位置进行置位,其他任务会根据标志位置的值执行相应的操作。
地面站设计
针对无人机的测试和控制需求,设计了具有远程控制、数据采集和在线调参功能的地面测控系统,软件内还实现了飞行模拟器,可以实现对姿态控制系统的仿真模拟。系统的整体架构框图如图7所示,各模块的基本功能如表3所示。
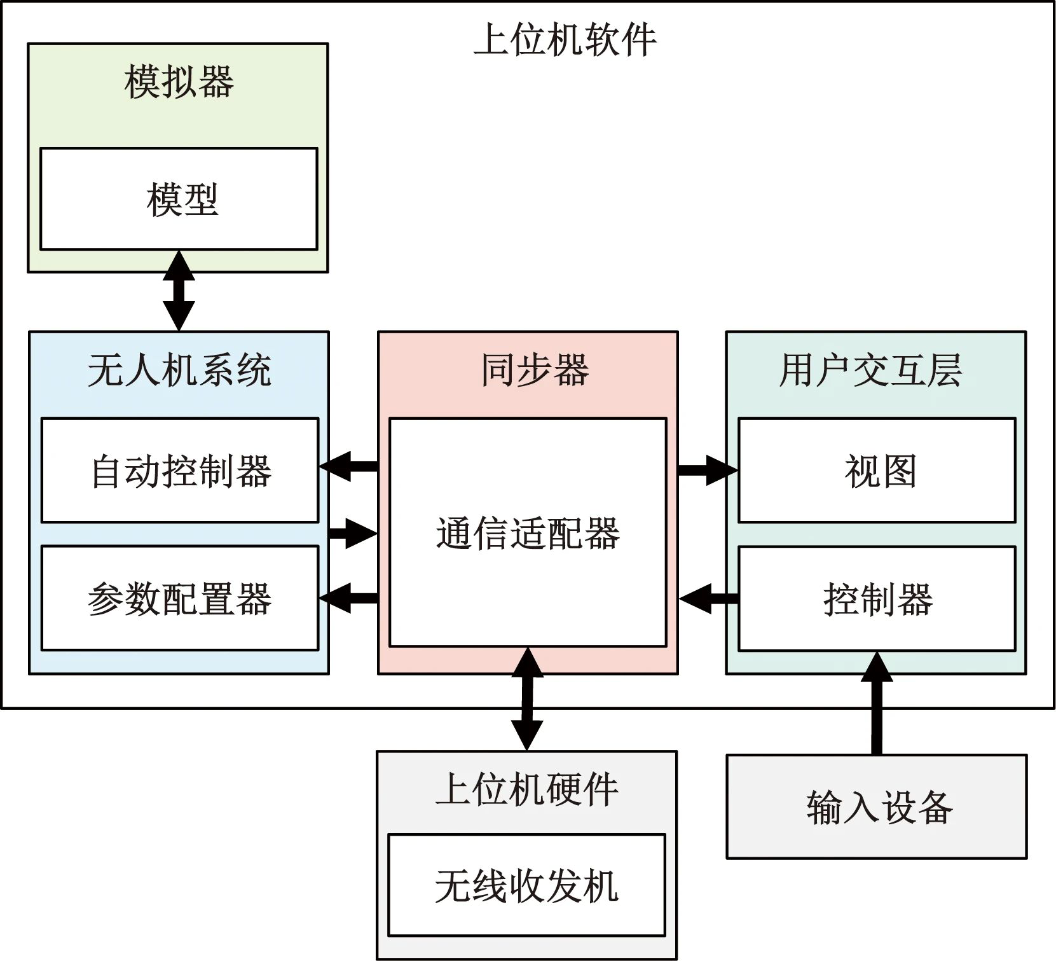
图7 地面站系统框图
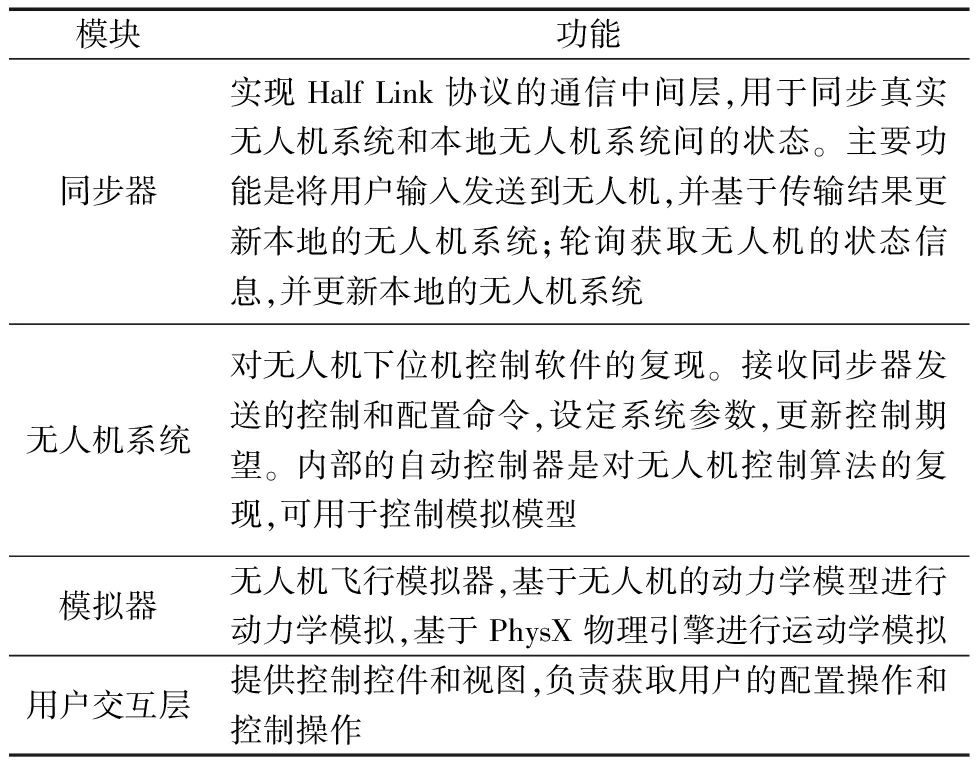
表3 地面站模块功能
为了提高开发速度,增强程序健壮性,基于Unity3D和C#语言编写地面站程序。C#是微软开发的高级编程语言,Unity3D 是一种常用于游戏开发的集成创作工具,基于 Unity3D 的跨平台特性,本系统具有在计算机、智能手机、智能电视等多类平台运行的能力,目前地面站飞行模拟软件界面如图8所示。
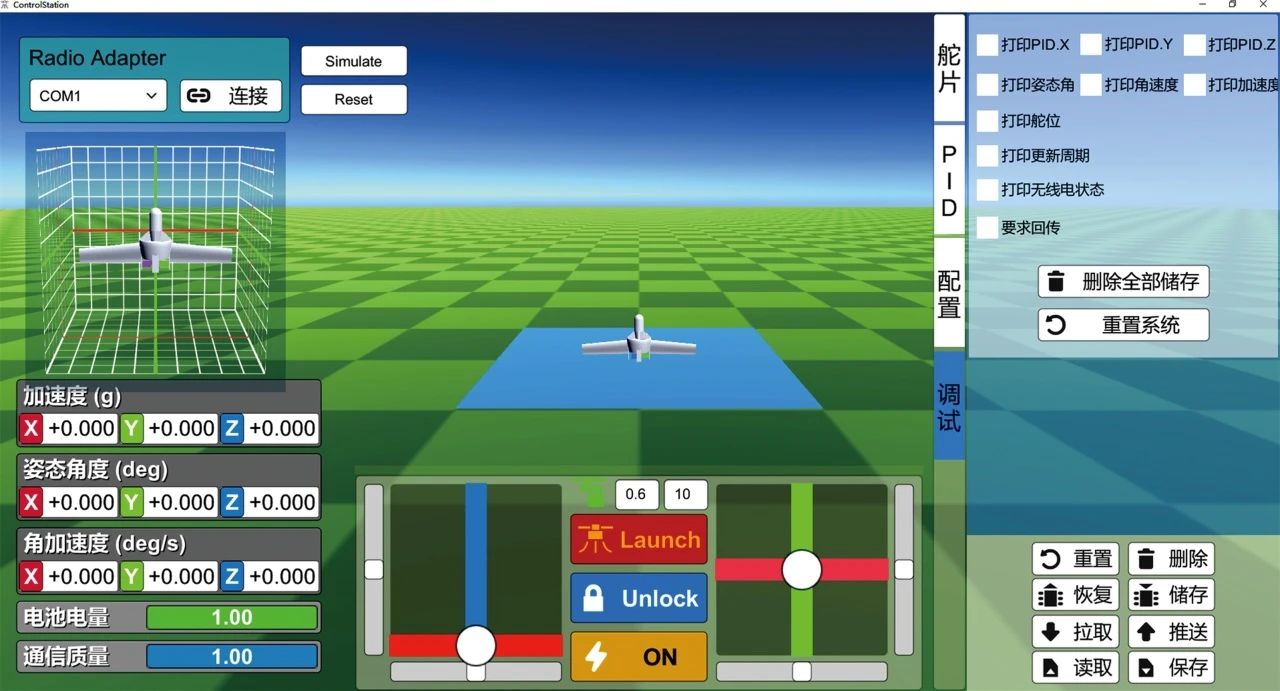
Simulate为模拟;Reset为重置;Launch为起飞;Unlock为解锁;ON为上电
图8 地面站模拟软件界面
地面站可通过模拟和飞行切换按键切换模拟飞行和实时飞行模式切换,实时飞行模式下可以按现场飞行状况实时发布飞行任务。
实验校验
设计基于双闭环 PID 控制算法实现飞行器不同模式下的姿态控制,通过实际飞行实验验证其对飞行指令的跟踪效果结果如图9所示,飞行器可稳定快速响应飞行姿态指令。
实验通过地面站发送控制指令,飞行器机载系统传回姿态信息,使用地面站采集飞行器的飞行姿态与控制目标数据,结果如图10所示。分析实验数据曲线,从图10(a)、图10(b)可见x、y轴的翻滚角 φ与俯仰角 θ的实线实际飞行姿态角与虚线指令目标的姿态角在维持飞行姿态过程中两曲线非常接近平均稳态误差为0.35°表现良好已达到预期效果,但在姿态指令突变时x轴的平均超调量在19.8%略大于y轴的15.6%,初始猜想是由于机翼的影响使x轴转动惯量较大,为减小超调量与误差故将机翼拆卸虽超调量降至16.5%有所减小但效果仍不及y轴,为优化x、y轴的指令跟踪效果后期可进行迭代的飞行实验选取更加适当的外环kd值或者对姿态控制算法进行进一步的改进。由于
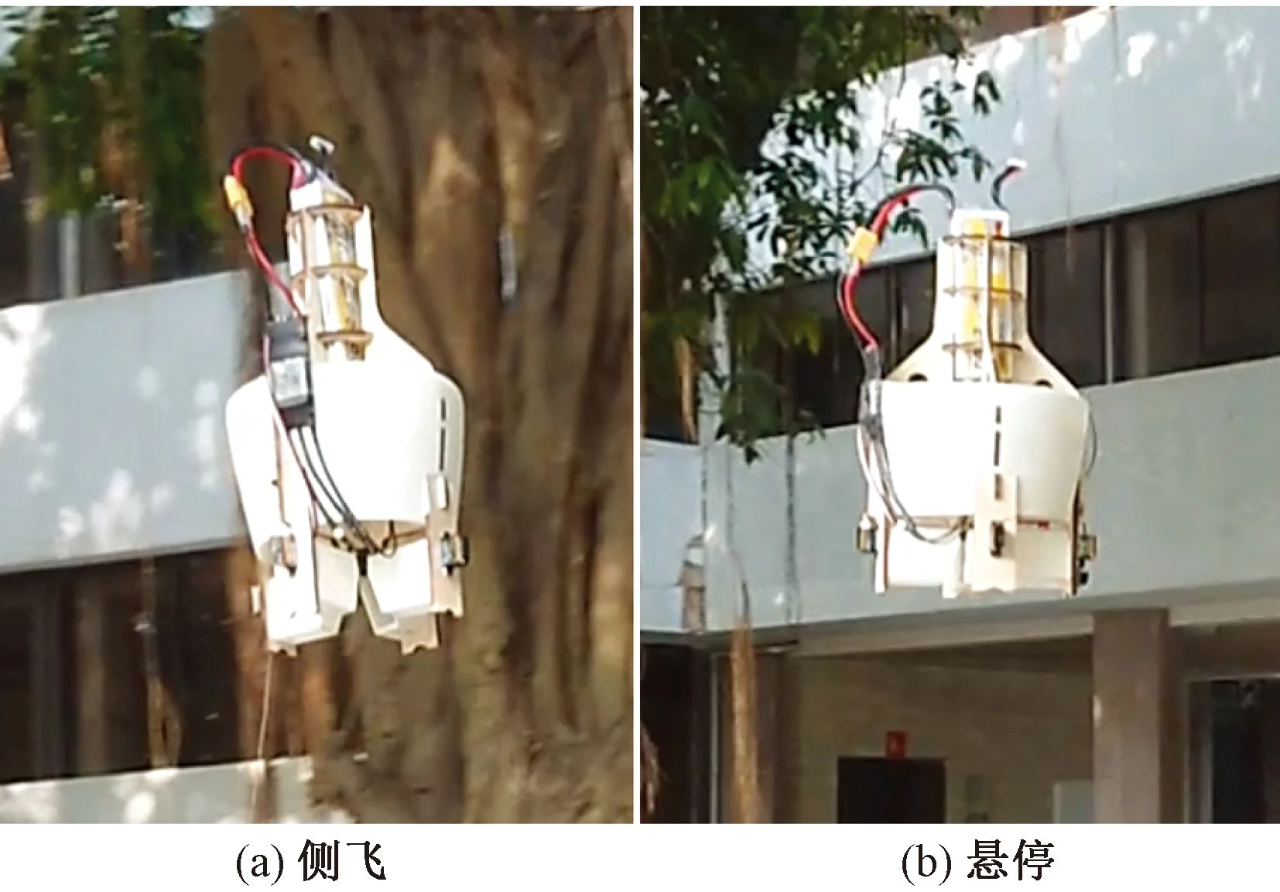
图9 无人机试飞图
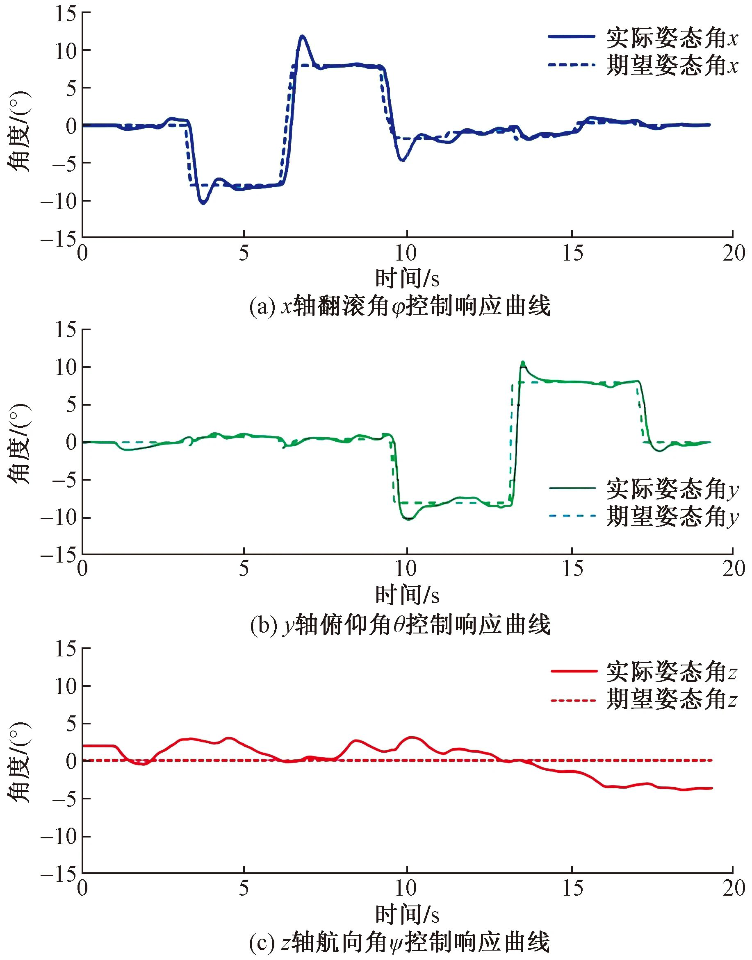
图10 飞行器姿态指令响应图
z轴采用单环控制,且飞行器螺旋桨在不同转速下产生不同的自身扭矩对航向角的干扰。由图10(c)可知,存在实际航向角与指令航向角间持续变化的偏差,平均稳态误差为2.25°效果表现一般但由于单涵道飞行器特殊的结构此效果已可满足实际飞行后期将通过加入精确的自身扭矩补偿以提高z轴控制性能。经过飞行实验,可见以上参数已可以维持飞行器稳定快速的响应,但若要获得最佳参数,还需经多次迭代飞行实验选取最佳的参数。
结论
提出了一种既可垂直起降又可高速飞行、且具大载荷起飞能力的单涵道式无人机的全面性的系统设计方案,由于单涵道飞行器特殊的外部结构以及与多旋翼不同的姿态控制方式对实际工程应用有着很大的挑战,方案中通过解耦确定各舵面的控制分配律且同时基于双闭环PID算法设计姿态反馈控制器去克服了这些挑战。最后通过无人机软硬件控制系统和地面站联合控制进行飞行实验,实验数据表明此方案具有良好的飞行效果,对飞行姿态控制的稳态误差以及飞行姿态指令的跟踪性能都有着令人满意的效果。研究成果为未来单涵道飞行器的姿态以及位置跟踪提供了坚实的基础以及宝贵的实践经验。