飞机电推进技术工信部重点实验室研究人员在多智能体系统协同控制方面的研究
研究背景
由于一致性跟踪控制是编队、合围、蜂拥等许多集群行为的基础,一致性跟踪控制近些年来受到了极大关注。然而,大多数既有的一致性跟踪控制算法仅能实现渐进收敛。在研究一致性跟踪控制算法时,一致性时间是重要的性能指标。固定时一致性跟踪控制协议可以保证跟随者状态在由设计参数确定的有界时间内收敛到领导的轨迹。这方便了一致性时间估计和控制参数设计来满足一致性时间要求。与渐进控制协议相比,固定时控制协议具有更快一致性速率、更强的鲁棒性。近些年来,固定时一致性跟踪控制器方面取得了很多研究成果。但是,这些结果没有考虑通信信道衰减。当信号通过无线网络传输时,其传输功率受到很多因素影响,例如,多径传输、障碍的遮蔽效应和与距离相关的路径损失。此外,一部分信号能量将可能被通信信道吸收或者以热能形式损失。最后,信号幅值可能受到外部干扰的影响,这些都会导致信号衰减。信道衰减降低了信号幅值、增加了误码率。由于信道衰减的存在,智能体无法获得准确的邻居状态信息,这将影响一致性跟踪控制协议的控制性能,甚至导致失去一致性。因此,研究信道衰减下多智能体系统固定时一致性跟踪控制非常有必要。
研究信道衰减下多智能体系统固定时一致性跟踪控制是非常有困难的。其难点主要体现在:1. 衰减系数受到时间、地理位置、无线电频率、干扰强度等因素的影响,具有随机时变特性,这使得获得精确的衰减系数变得不可能;2. 智能体无法收到邻居精确状态信息,仅能获得获得带有未知衰减系数的衰减信息,这给领导状态的估计带来了很大的困难;3. 有向通信拓扑的不对称特性给分布式观测器的设计带来很大的困难;4. 由于跟随者无法获得精确的领导状态,所计算的跟踪误差和实际跟踪误差之间存在偏差,这给一致性跟踪控制器设计带来很大的困难。
因此,信道衰减下多智能体系统固定时一致性跟踪控制问题是一个重要且富有挑战性的问题。
仿真验证
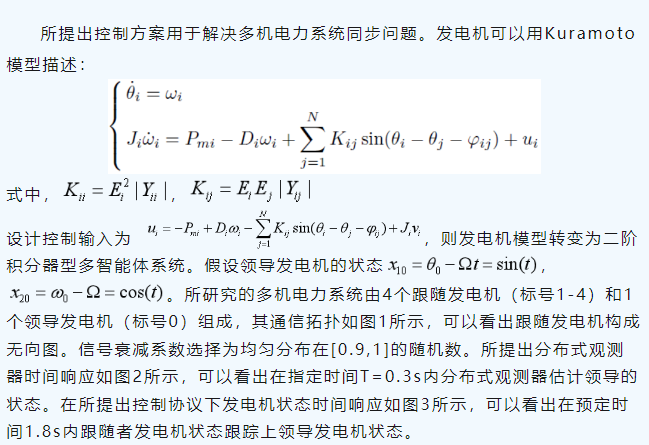
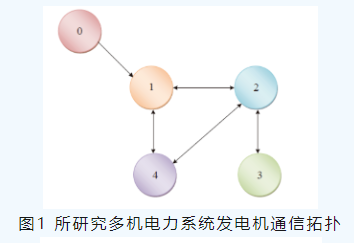


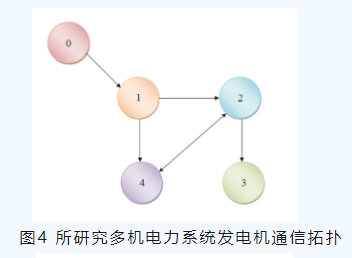
当跟随发电机形成有向通信拓扑,如图4所示,所提出分布式观测器时间响应如图5所示,可以看出在指定时间T=2s内分布式观测器估计领导的状态。在所提出控制协议下发电机状态时间响应如图6所示,可以看出在预定时间10s内跟随者发电机状态跟踪上领导发电机状态。


结论
这篇论文提出了一种固定时一致性跟踪控制方法,解决了受到信道衰减影响的有向和无向通信拓扑下多智能体系统固定时一致性跟踪控制问题,李雅普诺夫稳定性分析证明了所提出控制方案实现了预定时一致性跟踪,将所提出的控制方案用于多机电力系统同步,仿真结果验证了所提出控制方案的有效性。这篇论文的贡献在于:
1. 解决了受到信道衰减影响的有向和无向通信拓扑下多智能体系统固定时一致性跟踪控制这一重要且富有挑战性的问题。
2. 提出了受到信道衰减影响的有向和无向通信拓扑下指定时间分布式观测器设计方法,使用衰减系数的期望值并引入多余项来消除信道衰减的作用;利用有向图和无向图的H矩阵特性,设计了有向和无向通信拓扑下分布式观测器;所设计的分布式观测器可以实现指定时间领导的状态估计,设计者可以在不需要全局信息的情况下选择恰当的分布式观测器参数来满足领导状态估计时间的要求。
3.提出了一种新颖的预定时间控制方法实现了实际预定时间一致性跟踪。设计了自适应参数补偿由信道衰减造成的不匹配干扰,引入预定时间微分器给出虚拟控制的导数,克服复杂性爆炸问题,提出了新的预定时间控制消除信道衰减的影响,实现了实际预定时间一致性跟踪。